超小型マイコンでIOT、遠隔監視ロボット実装
さてみなさまこんにちは。
まぶちでございますよ。
値上げが続く
ほとんどの製品が極めて大きな値上げで動いており、大変な状況になってしまっております。
ほぼすべての原価があがっている割に、製品単価は据え置きのため、非常に厳しい環境にあります。
こうした中でもっとも重要なのは、会社内の原価をいかに下げていくか。
ということです。
そのためのツールづくりにいま力を割いています。
工場の方では、IOTの実装を勧めています。
IOTツール
我々の最新鋭の機械、レベル4自動有孔加工機は加工中の完全無人化を目指しています。
建材業界において量産品と言うのは、非常に低コストで制作せねばなりません。
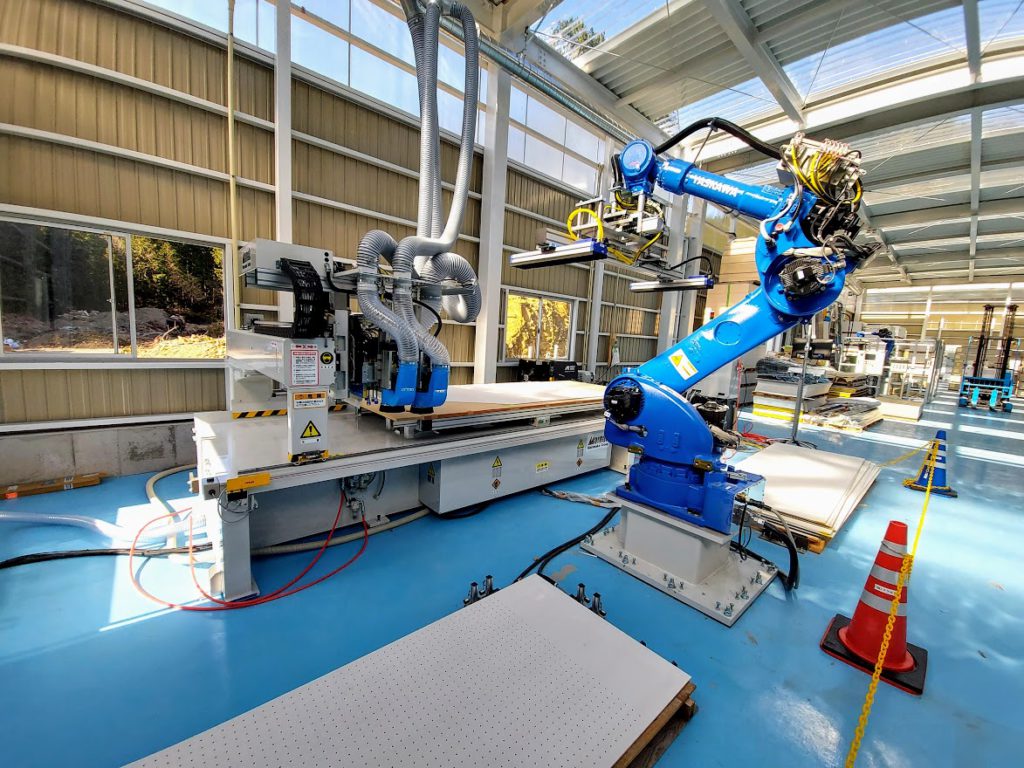
また中国等から国内回帰させるために、完全に無人化した状態で機械を動かしていく仕組みづくりを作っていく必要があると感じました。
そのための旗艦機なのですが、実は問題も非常に多く、見えていないので途中で止まったり、エラーを起こしたりといった点があります。
そこで現場から、遠隔で見えるようにして欲しい。
また遠隔で非常停止ボタンを押せるようにして欲しい。
という要望がありました。
工場内に極論だれもいなくても停止ボタンをおすことができればそれは非常にメリットがあります。
また各エリアにおいて、センサーを用いて情報を拾うことができれば、ある一定の閾値をこえた段階で
アラームを発して、LINE等でお知らせしてくれる仕組みづくりはとても便利だと思います。
今回は、IOTセンサーに実装されているRaspberrypiというシングルボードコンピュータを利用して
そこからWIFI経由で、動画を転送してくるような形になります。
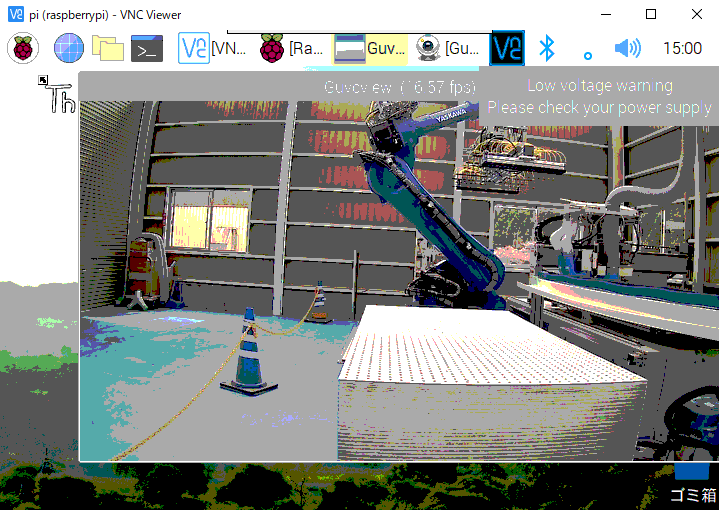
工場の様子をリアルタイムでモニタリング可能です。
また改良版では、サーボモーターにより、向く角度を変化させることもできそうです。
フレームレートは、6fpsしかでていませんが、動作確認用なのでひとまずはこれで行こうと思います。
また工場から、機械終了時の情報をわかるようにして欲しい等いろいろな要望を聞いておりますが、
全く知見が足りず一つ一つなんとかこなしている状況です。
次回は集塵機の中に入って内部を調査してくるロボットを開発したいと考えています。
ロボットの概要は、粉塵の上を走行するので、キャタピラ型にします。
キャタピラで動きますが、粉がスゴイので、粉塵の影響がすくないワンチップマイコンのRaspberrypiPICO基板とします。
本来はWIFIにて遠隔自動操縦をしたいところではありますが、集塵機の配管がブリキスチールでできているので、WIFIではなくlanケーブルの有線接続とします。
このlanケーブル自体は詰まったときの引き出しケーブルを兼ねており、詰まったとき、動作がとまったときに引き出せるようにする予定です。
○動作要求概要○
1.自由動作
前後左右に動くことができる。パソコンから遠隔で操作できる。
2.カメラ
カメラモジュールを搭載し、様子を見ることができる。
3.照明
カメラの前方を照らすことができ、内部の様子を見ることができる。
こんなロボットにしたいと考えています。
ではまた!IOTもすすめていきたいと思います。



