【爆誕❢❢】宿題お邪魔ロボット❢❢
さてみなさまこんにちは。
まぶちでございますよ。
電子工作IOT
さて、
電子工作とプログラミングを先生に教えて頂いており、
頭空っぽの方が夢詰め込める・・・
とのことで、どんどんと吸収できております。
先生が素晴らしい方でございまして、
本当に教えて頂く先生によって成長度合いが変わってくる。
ということを痛感しております。
いままでは独学でしたが、先生について教えて頂くことで、最適解が導きやすくなっております。
さて、そんななかで家でもIOTができないかと考えることが多くなってきました。
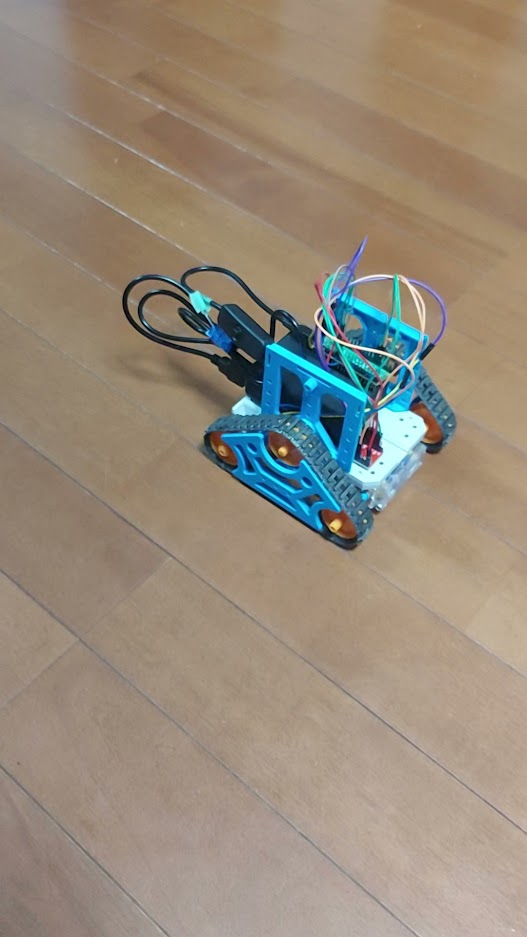
とりあえずできることとして試行錯誤した結果、ロボットをまたしても誕生させてしまいました。
ロボットの詳細は、
前回のモジャモジャロボット、略してモジャボットの配線があまりにも汚かったので、
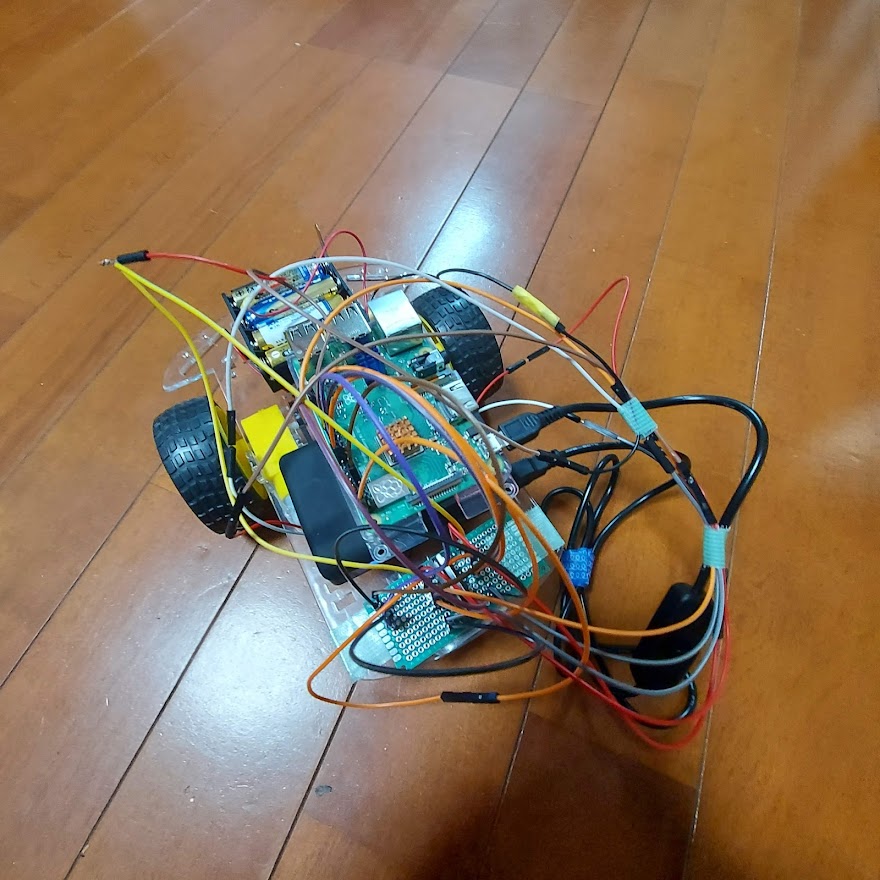
もはや、風呂の排水口の住人みたいになってましたので、今回は改善しました。
改善ポイント
配線をスッキリさせる必要がある。
前回は、コアであるシングルボードコンピューターをラズベリーパイという基板でおこないました。
しかしそれだと配線がぐちゃぐちゃんになります。
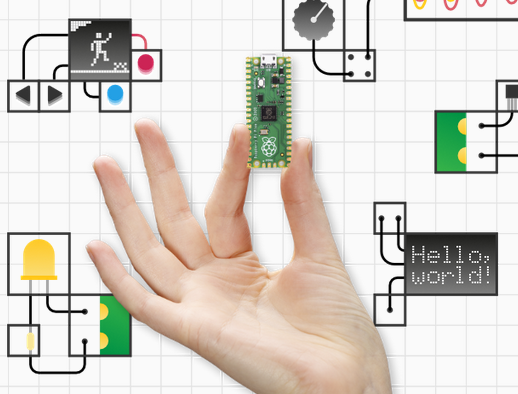
そのため本体をよりシンプルなラズベリーパイピコに変更しました。
ラズパイ自体、名刺よりちょっと大きめサイズなんですが、それでもかなり大きい。
さらに横がわに電源端子があるので、ここにコードをさすとかなりかさばるんです。
そこで、ラズパイピコを選択
こちらは大きさとしては、そうとう小さいです。
名刺の3分の1ほど。この大きさ。
コーディング
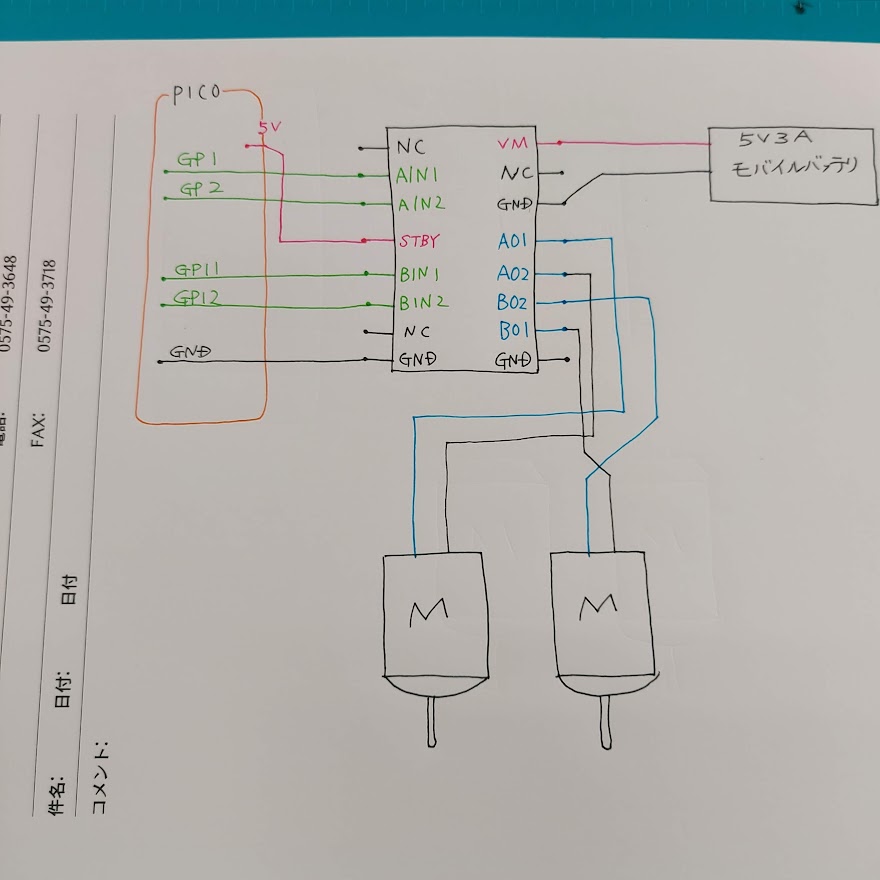
今回のロボットは、2つのDCモーターを1つのモータードライバーで制御しています。
モータードライバーは、2つのモーターへの反転、正転を指示できます。
そのため、前進、後進、右、左、右超信地旋回、左超信地旋回、ブレーキが可能になっています。
配線方式
ラズパイピコは、Pythonプログラムをmain.pyという名前で保存すると、
電源を入れた瞬間にこのコードを実行していきます。
main.pyに自動で動くプログラムを創り、電源をオンすると、自動でうごきだします。
爆誕❢❢ロボット
該当のロボットは、プログラムに応じて、モーターが動き、前後左右にグリグリ動きます。
子供が宿題をやっていたので、様子を見に行きます。
グリグリぐりぐり
じゃまやて❢じゃま❢❢
そのロボットじゃまやて❢❢
というわけで、
子供の宿題を邪魔するロボットが爆誕してしまいました・・・・
(とんでもなくしょうもないなバカッツ❢❢)